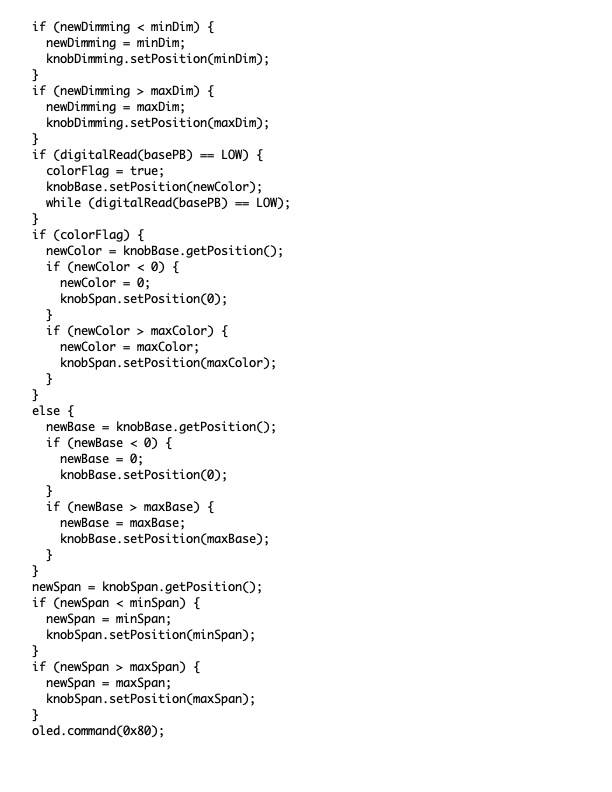
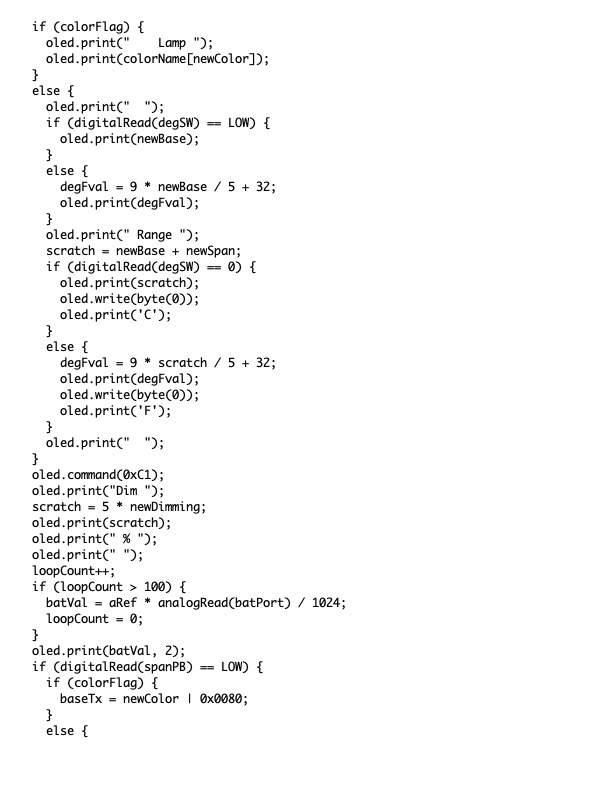
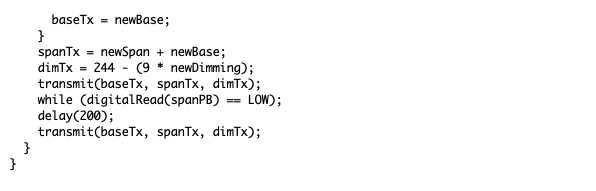
This is the Controller Program